ann_elucubrations
Sorting my notes about artificial neural networks
Mobile Inverted Pendulum
Simple Planar Model

The derivation of a space state equation is adapted from \cite{ostovari2014}
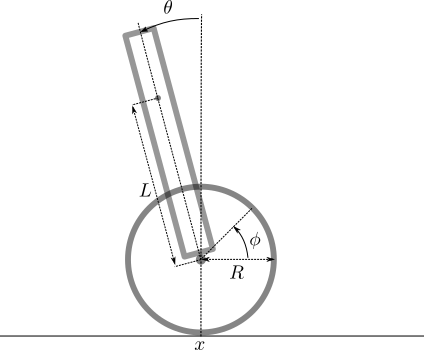
Notations
- , , , : respectively wheel and body masses and inertias
- : distance between wheel axis and body center of mass
- : wheel radius
- : angle between vertical and body axis
- : angle between horizontal and the wheel
- : horizontal coordinate of the wheel axis
Kinematics
Position of the body center of mass:
Velocity of the body center of mass:
Acceleration of the body center of mass:
The \emph{no slip} hypothesis also brings:
Dynamics
-
Angular acceleration of the wheel
-
Linear acceleration of the wheel
-
Angular acceleration of the body
-
Linear acceleration of the body in direction:
State Space Equation
\begin{equation} \left(I_w + (m_b+m_w)R^2\right) \ddot{\phi} + (m_b R L \cos{\theta}) \ddot{\theta} = m_b R L \dot{\theta}^2 \sin{\theta} + \tau \end{equation}
or matricially
with
and
When the system has full rank (), equations can be separated, leading to
or
which expands to:
References
\bibitem{ostovari2014} Saam Ostovari et al {\em The dynamics of a Mobile Inverted Pendulum (MIP)} 2014.