ann_elucubrations
Sorting my notes about artificial neural networks
Robot Arm
Description
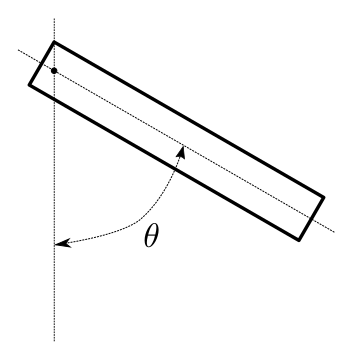
The single joint Robot Arm (or pendulum) is a classic example used in control theory. It consists in a solid rotating around a fixed axis. It is controlled by a torque applied to the rotation axis. It’s a mildly non linear second order system.

Model
Using Physical parameters, the dynamic can be written as:
The dynamic can be abstractly rewritten as
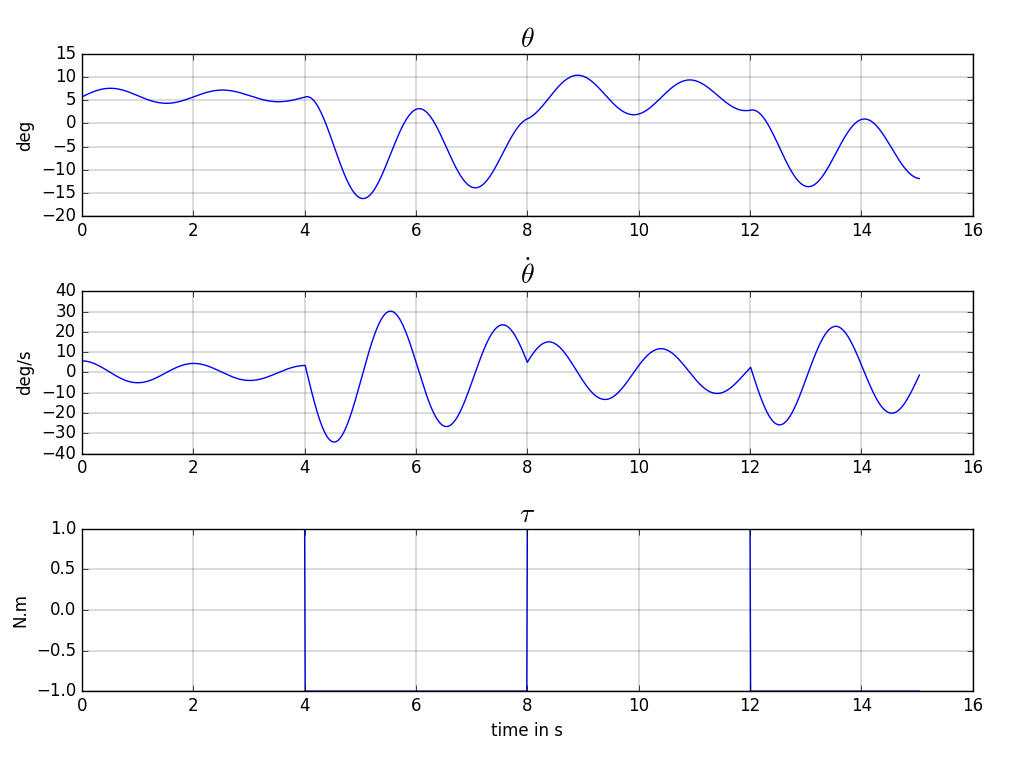
Figure (2) shows a simulation of the model, obtained with this code.