Control Sandbox
Control Experiments in Python.
Mobile Inverted Pendulum
Simple Planar Model

The derivation of a space state equation is adapted from (1). A python implementation is available im the file planar_mip.py
Notations
- , , , : respectively wheel and body masses and inertias
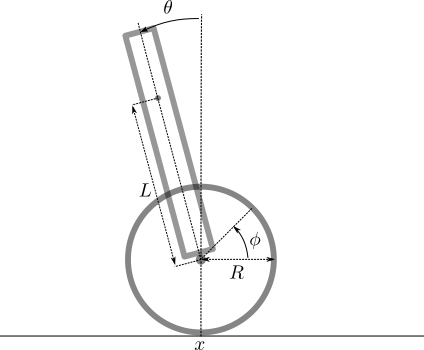
- : distance between wheel axis and body center of mass
- : wheel radius
- : angle between vertical and body axis
- : angle between horizontal and the wheel
- : horizontal coordinate of the wheel axis
- : the motor torque applied to the wheel
Kinematics
Position of the body center of mass:
Velocity of the body center of mass:
Acceleration of the body center of mass:
The no slip hypothesis also brings:
Dynamics
-
Angular acceleration of the wheel
-
Linear acceleration of the wheel
-
Angular acceleration of the body
-
Linear acceleration of the body in direction:
State Space Equation
or matricially
with
and
When the system has full rank (), equations can be separated, leading to
which expands to:
Simulation
The dynamic model for the planar MIP is available in the file planar_mip.py. Figure 2 display a simulation of the MIP with zero torque applied to the wheel.
References
- (1) The dynamics of a Mobile Inverted Pendulum (MIP), Saam Ostovari et al, USCD, 2014