Control Sandbox
Control Experiments in Python.
Planar VTOL
The following figure describes the variables and parameters of the model:
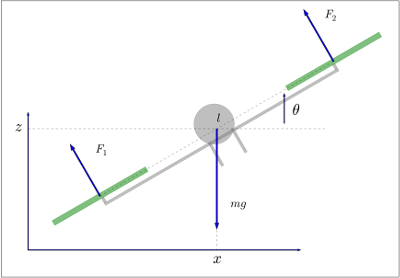
Generalized coordinates
Kinetic energy
Potential energy
Lagrangian
| $$ \begin{cases} \frac{\partial{L}}{\partial{x}} = 0 \\ \frac{\partial{L}}{\partial{z}} = - m g\\ \frac{\partial{L}}{\partial{\theta}} = 0 \\ \end{cases} $$ | $$ \begin{cases} \frac{\partial{L}}{\partial{\dot{x}}} = m\dot{x} \\ \frac{\partial{L}}{\partial{\dot{z}}} = m\dot{z} \\ \frac{\partial{L}}{\partial{\dot{\theta}}} = J \dot{\theta} \end{cases} $$ |
Lagrange Equations
*
*
*