ann_elucubrations
Sorting my notes about artificial neural networks
Here, the plant is instable: MIP will trip unless activelly controlled. We can not obtain a training dataset in open loop.
First experiment
In this first experiment, the dataset used for the training is obtained by simulating MIP under the control of a linear regulator, as could be done on a real robot.
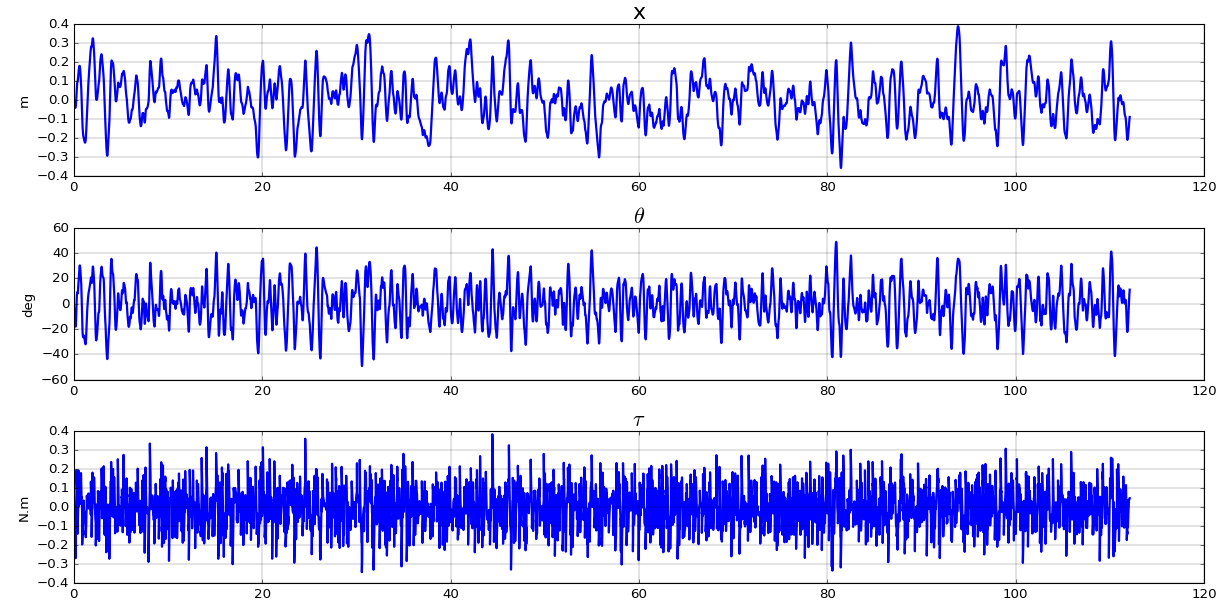
- As a preamble, a linear state feedback regulator is synthetized. It is then used to generate a training set by feeding a random setpoint to the regulator.
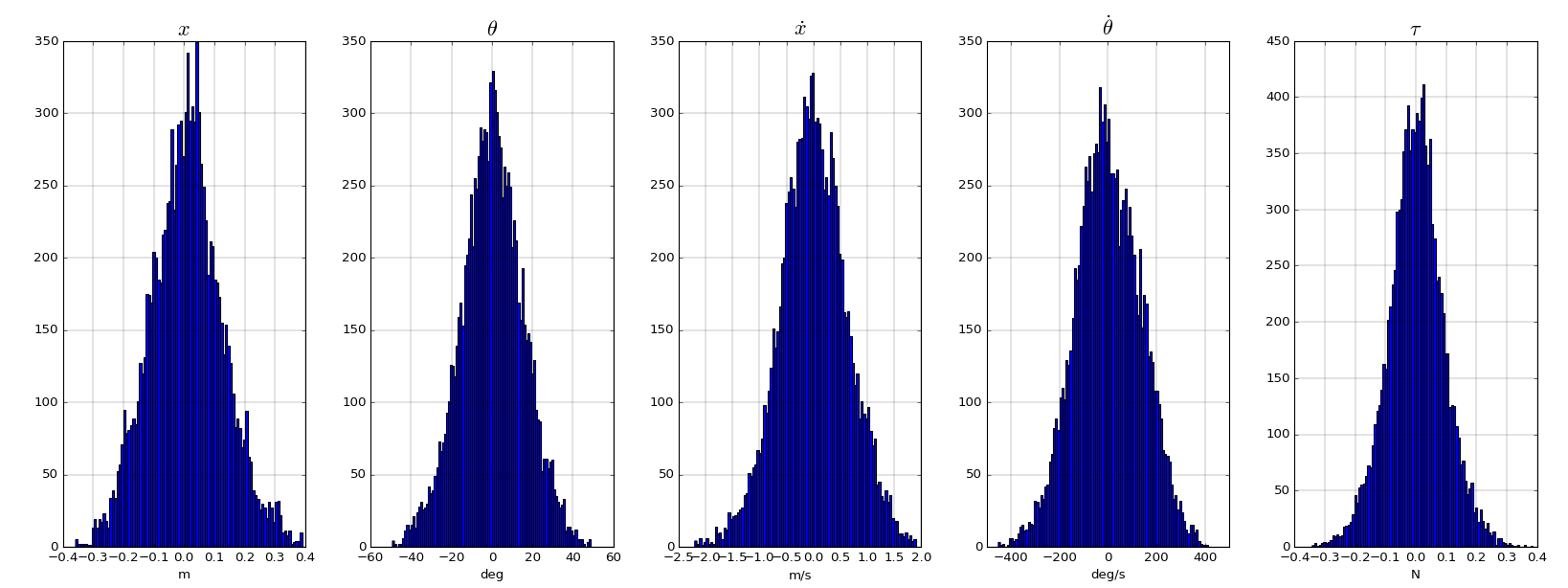
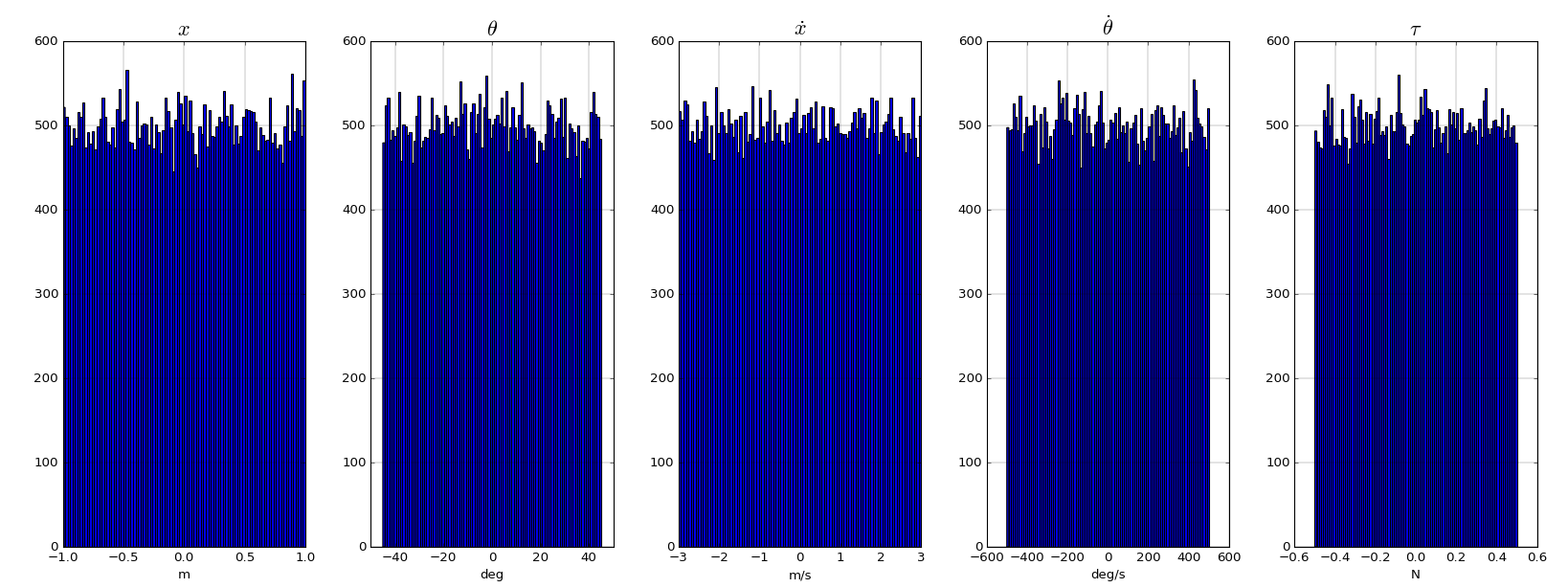
An histogram of the training dataset shows that the resulting distributions are far from uniform.
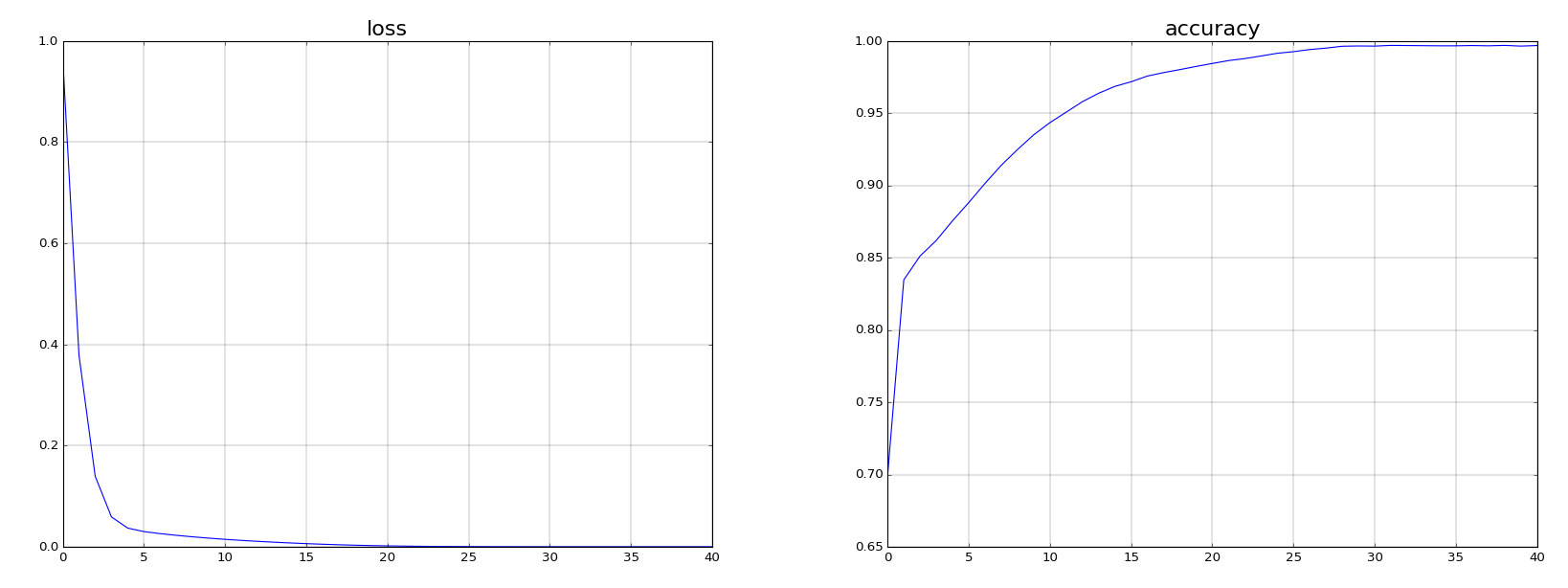
- A neural network with a single 4 neurons layer and a linear activation is then trained with a batch size of 32 during 35 epochs.
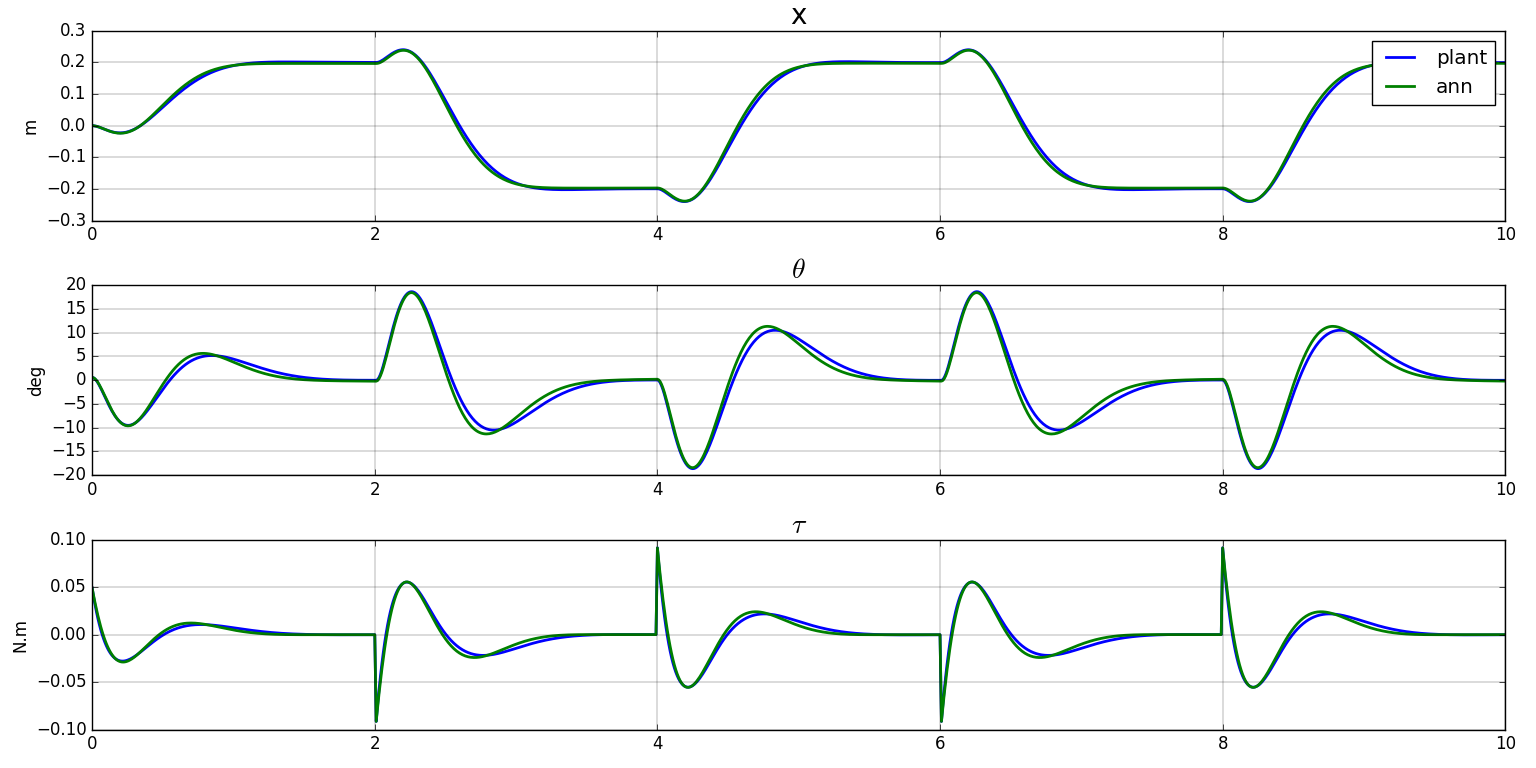
- The netork is validated with the regulator on a step input and shows that the behaviour of the MIP is globally captured
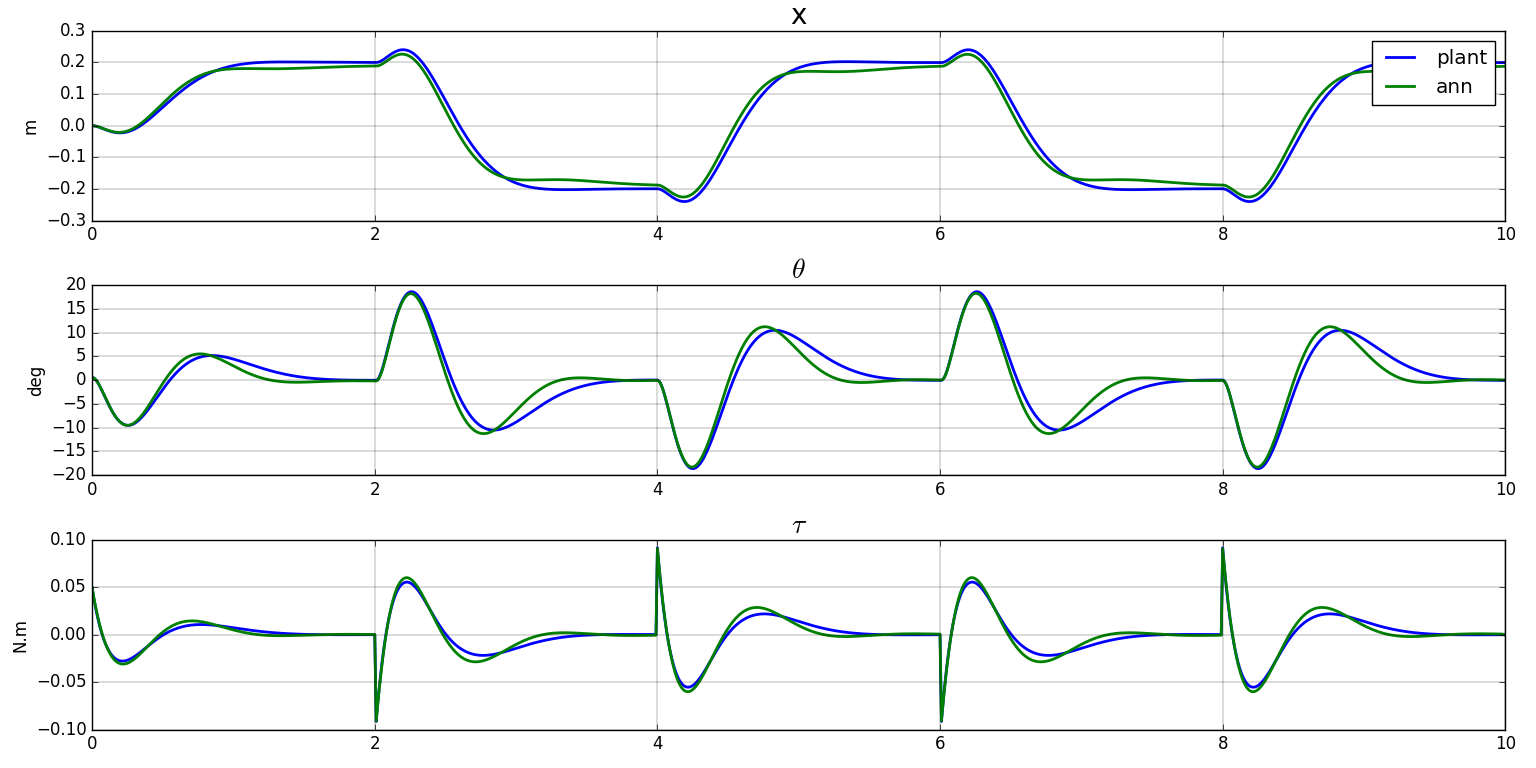
Second experiment
We now generate a uniform training dataset
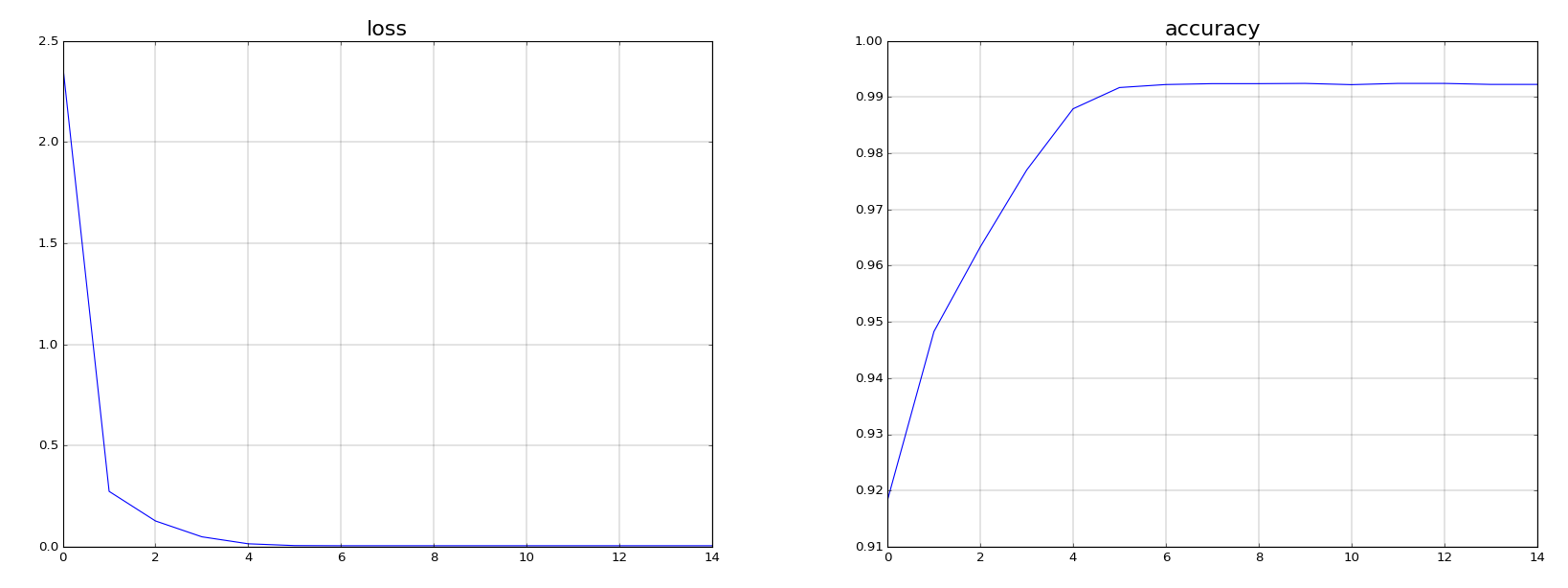
- The same neural network with a single 4 neurons layer and a linear activation is then trained with a batch size of 32. Convergence happens faster (15 epochs).
- the netork is validated with the regulator on a step input and shows that the behaviour of the mip is globally captured and a little bit better than with the previous training dataset